The atm_builder tool constructs the atmospheric databases that are
utilized by the DIRSIG5 NewAtmosphere plugin.
Summary
The atm_builder tool and NewAtmosphere
plugin were created to provide a new foundation for supporting for
physics-based atmospheric models in DIRSIG5. The NewAtmosphere
and atm_builder toolchain attempt to address a number of
limitations of the DIRSIG4-era
make_adb and "classic" atmosphere model combination in a variety
of ways.
The figure below attempts to illustrate the relationship between
NewAtmosphere plugin and atm_builder program in the context of
the overall simulation. This figure also attempts to show the
relationship to other components of the simulation including the
ephemeris plugin, sensor plugins(s), and scenes used in the simulation.
The atm_builder interacts with the loaded sensor plugin(s) to
gather information about the temporal and spectral states that will
need to be provided by the database. The builder also interacts
with the loaded scenes to gather information about the scene locations
and bounding boxes.
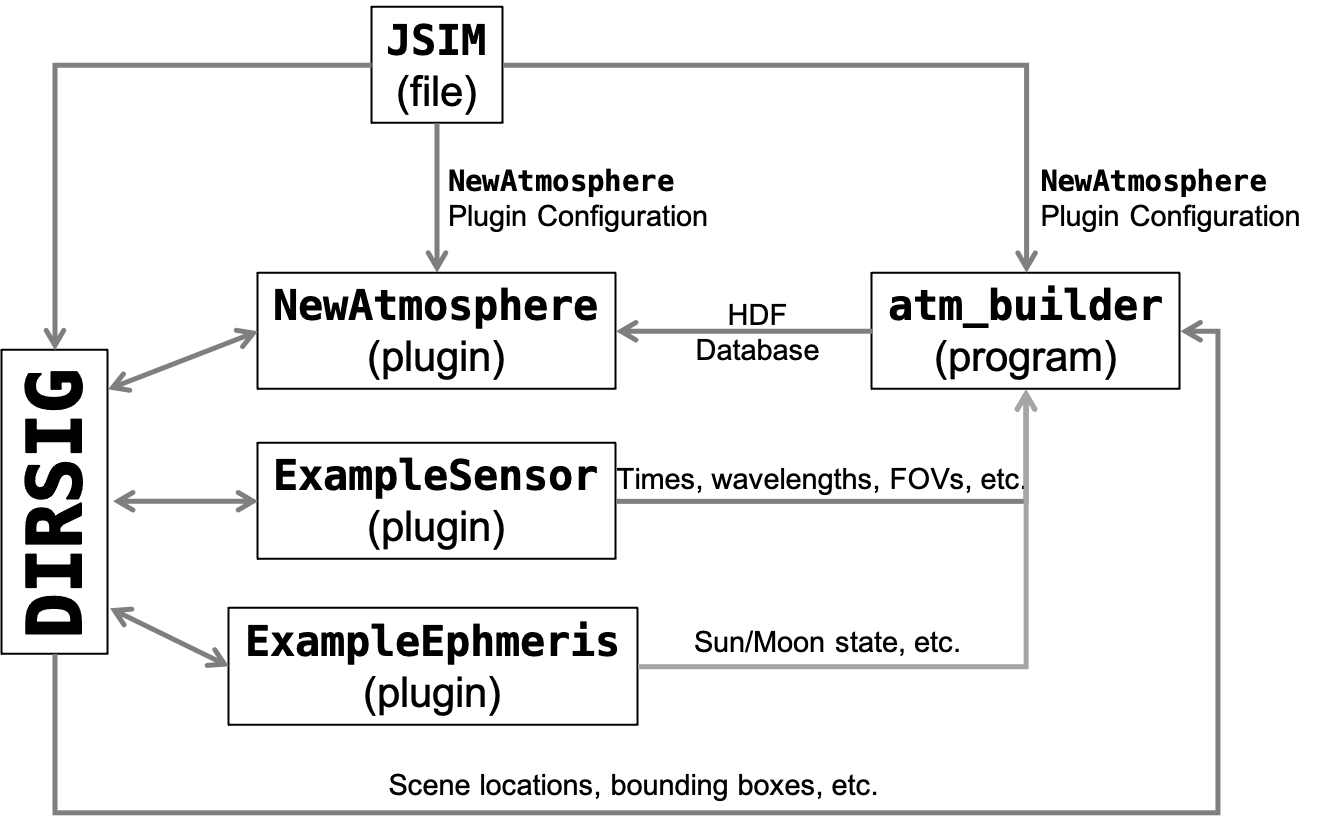
atm_builder program and other components of the simulation.Approach
The design of the HDF database and the approach to populating the data for
that database was strongly influenced by the lessons learned with the
DIRSIG4-era make_adb tool. The general structure of the database is
based on data tables that are organized into "states", which parallel the
spectral and temporal states used inside DIRSIG5. Each "state" represents
a specific spectral sampling and window in time. Multiple states arise from
unique combinations of these spectral and temporal
-
An RGB instrument will request a set of wavelengths specific to that sensor but when it is capturing data over a long period of time, then the atmosphere will need to be temporally sampled over that time window. This results in a set of states that all have the same spectral sampling but are for different points in time.
-
In contrast, a multi-sensor payload with an RGB camera, SWIR camera, MWIR camera and LWIR camera might only collect data at a single point in time, but will require at unique state for each camera due to address the multiple spectral windows. This results in a set of states that have the same temporal sampling but different spectral sampling.
-
And a complex simulation might have multiple sensors (different spectral and temporal samplings) that result in many spectrally and temporally unique states.
|
|
In addition to important aspects of the atmosphere changing with time (specifically, the position of the sun and resulting atmospheric scattering), each unique temporal state might also result in needing to predict a unique spatial and/or angular region of the atmosphere due to dynamic platform motion. |
The atm_builder tool leverages a set of
backend models that provide
a generic interface to atmospheric radiative transfer models (e.g.
MODTRAN, etc.). The builder creates generic requests for the backend
models, and these backends translate the request into inputs for
the respective external model. An example request is "get the
spectral irradiance from the sun reaching a given latitude, longitude
and altitude at a specific date and time". The builder creates a
list of requests and then submits them to the backend, which allows
the backend to parallelize these requests (if possible).
The atm_builder tool constructs it’s list of requests using the following
approach to determine the needs of the various sensors configured in the
simulation:
-
The sensor plugins for the simulation are loaded and initialized.
-
A list of temporal states spanning the sensors is constructed.
-
A given sensor might have a read-out rate that results in 10s, 100s or 1000s of unique times during the simulation. However, these times might only be separated by fractions of a second during which we would not expect the atmosphere to change. In that case, it would be inefficient to rerun an atmosphere model (e.g. MODTRAN) only to get the same results.
-
Hence, there is a time resolution that is used to temporally partition these times into quantized times between which we do expect the atmospheric values to change significantly. The user has control over this temporal quantization (see the
time_deltavariable discussed later in this manual).
-
-
Once the set of unique temporal states have been determined, a set of combined spectral+temporal states is created.
-
For each time window, the sensors that will be imaging during that window are identified and a unique spectral+temporal combo state is created for each sensor that has a unique spectral sampling.
-
Additionally, all the captures (e.g. focal plane readouts) that are in the time window for each sensor is determined.
-
-
At the end of the combo state generation process, the tool has a set of combo states, where each state represents a unique time, a unique set of wavelengths and a unique angular region of the atmosphere (driven by the fields-of-view (FOV) of each capture mapped to the state).
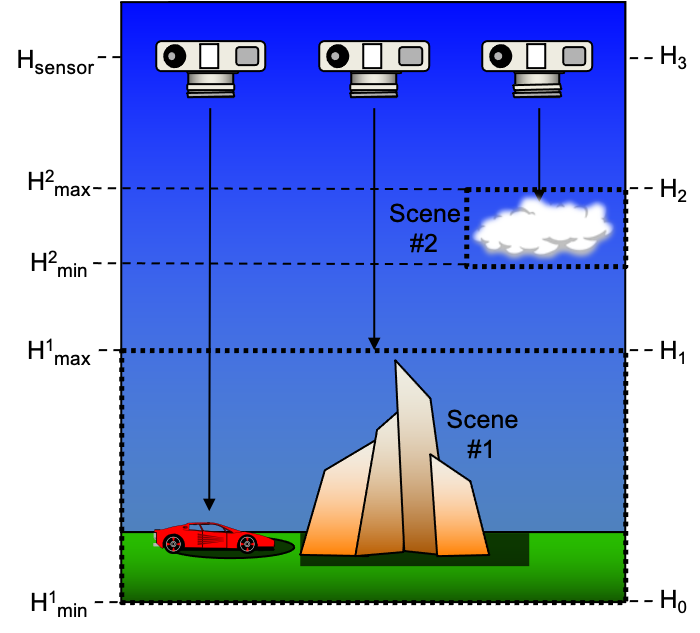
The list of combined spectral+temporal states form the top-level of the hierarchical database. The next level in the database addresses the needs of the scenes in the simulation. Specifically, what altitudes need to be considered when the atmospheric models are run. For example, a space-based sensor looking down on the Earth might see all the way down the ground, so the altitude of the ground scene needs to be established. That scene might span a large range of altitudes due to mountains that are represented in the scene. In that case, we might want to make requests of the backend atmosphere models to know something like the ground reaching solar irradiance at multiple altitudes so that values can be appropriately interpolated. To establish these key altitudes, the bounding boxes for all of the scenes used in the simulation are loaded. This allows the builder to get a handle on the spatial extents of the virtual world that will be modeled. However, it is not necessary to consider the differences in solar reaching irradiance, or path transmission to the top and bottom of a scene that is only a few meters tall. So the key altitudes to utilize are quantized to avoid unnecessary backend model requests. The following approach is used to generate the final list of key altitudes.
-
Iterating across the scenes, the minimum and maximum Z for each scene is extracted and added to a list candidate altitudes.
-
The list of altitudes across all scenes is sorted to account for vertical overlaps in altitude ranges.
-
The lowest altitude in the sorted list is added as the first key altitude.
-
Moving up through the higher altitudes in the sorted list, new altitudes are added to the key altitude list each time one exceeds the previously stored altitude by a given range (see the
altitude_deltavariable discussed later in this manual).
|
|
The optional --altitude_list command-line variable and the
altitude_list JSON configuration variable will override this
approach.
|
|
|
The optional <groundaltitude> in the scene file allows the
user to explicitly define the altitude of the scene that
should be interpreted as the minimum or "ground" altitude.
This avoids the shortcomings with assuming that the
minimum, average, etc. Z of the scene is the "ground".
When a scene HDF contains the GroundAltitudeOverride
(an optional file attribute that carries the <groundaltitude>
from the scene file), the algorithm outlined above will
use this override value rather than the minimum Z from
the bounding box.
|
The list of combined spectral+temporal states and the list of key altitudes are fed to request generator, which will submit the various backend requests needed to satisfy the needs of the simulation.
Program Usage
The atm_builder tool is what will build the HDF atmospheric database. It
loads the simulation configuration, determines what backend calculations
need to be performed and then has the backend execute those calculations.
Below is the command-line usage message when either no arguments or the
--help option is supplied:
$ atm_builder --help Usage: atm_builder [options] filename Database builder for NewAtmosphere plugin. Positional Arguments: filename (required!) The input filename (.jsim). Options: -h/--help Display this help and exit. -v/--version Display build and version info and exit. --log_level string Sets the minimum logging level (debug, info, warning, error, critical, off). Defaults to info. --no_run Do not run the backend atmospheric model (aka 'dry run' mode). --save_files Save input/output files generated by the backend atmospheric model. --exec string Execution mode to use (local, mpi). --time_delta int Set the interval between time steps in seconds, defaults to 900. --altitude_minimum float Set the minimum altitude in meters, defaults to 0. --altitude_delta float Set the interval between altitude samples in meters, defaults to 500. --altitude_list string Set the list of altitudes samples with comma-separated values. --fov_min_deltas float float Set the minimum angles (Δθ, Δφ) between sensor FOV paths in degrees, defaults to 5° each. --sky_zenith_sampling float float float Set the zenith (declination) sampling for sky paths. Expects min, max, delta. Defaults to min=7.5°, max=82.5°, delta=15°. --sky_azimuth_sampling float float float Set the azimuth sampling for sky paths. Expects min, max, delta. Defaults to min=0°, max=360°, delta=30°. --max_range float Set the maximum range in meters for the FOV paths [meters]. -j/--max_processes int Set the maximum number of backend model processes.
General operation entails supplying the name of the JSIM file to the tool, along with any options.
$ atm_builder example.jsim
Command-Line Options
The following command-line options provide additional utility:
--no_runor--no_run=<true,false>-
This option will tell the backend to configure all the backend runs, but it will not execute them. The input files will be preserved after the program completes. The default value is
false. --save_filesor--save_files=<true,false>-
This option will tell the backend to save all the input and output files generated to execute the associated model (overrides the
save_filesoption in the JSON configuration). The default value isfalse. --time_delta=T_delta-
This option will set the time resolution (in seconds) of the database (overrides the
time_deltavariable in the JSON configuration). The default value is 900 seconds (15 minutes). --altitude_minimum=H_min-
This option is used to override the altitude (in meters) for the lowest altitude in the altitude list used to generate the database.
--altitude_delta=H_delta-
This option will set the altitude resolution (in meters) of the database (overrides the
altitude_deltavariable in the JSON configuration). The default value is 500 meters (0.5 km). --altitude_list=H_list-
This option will define the list of sample altitudes (in meters) in the database. This option overrides the algorithm that determines the sample altitudes from the scenes and ignores the
altitude_minimumandaltitude_deltavariables used by that algorithm. (overrides thealtitude_listvariable in the JSON configuration). --fov_min_deltas=X,Y-
This option specifies the minimum angle between path samples within the field-of-view (FOV) of any given capture. The default values are 5 and 5 degrees in zenith and azimuth.
--sky_zenith_sampling=min,max,delta-
This option specifies zenith (declination) sampling of the sky. The default values are 7.5 → 82.5 degres @ 15 degree intervals (e.g.,
7.5,82.5,15.0). --sky_azimuth_sampling=min,max,delta-
This option specifies azimuth sampling of the sky. The default values are 0 → 360 degres @ 30 degree intervals (e.g.,
0,360,30.0). --max_range=R_max-
This option is used when the sensor FOV includes the horizon and is used to constrain the length (in meters) of paths computed by MODTRAN for DIRSIG paths above the horizon.
--max_processes=N-
This option will tell the backed the maximum number of external model processes it is allowed to create (overrides the
process_countvariable in the JSON configuration). The default value is the number of virtual cores on the host computer. --log_level=<L>-
This option allows the user to configure the verbosity of the tool output. The available options are
debug,info,warning,error,criticalandoff. The default isinfo. Setting this todebugwill yield addition information that can be useful for debugging purposes.
Configuration
The NewAtmosphere plugin configuration in the JSIM file is provided
to the atm_builder program to create the database used at run time.
The configuration of the NewAtmosphere plugin (which is used by
atm_builder) is described in detail in the plugin
manual.
The configuration of the supported atmospheric model backends is described
here.